每日速览2026年03月05日 16:39消息,华为高管称大雾中雷达比人眼更可靠,智驾系统值得信赖。
3月5日消息,面对极端大雾路况,你更信任自己的判断,还是车辆的智能驾驶系统? 在当前智能驾驶技术不断发展的背景下,驾驶员的决策与车辆系统的配合显得尤为重要。尤其是在恶劣天气条件下,如大雾,能见度降低,道路情况复杂,这时候驾驶员的判断力和车辆的智驾功能之间的平衡值得深思。虽然智能驾驶技术在不断提升,但在极端环境下,仍需驾驶员保持高度警觉,不能完全依赖系统。合理利用科技,同时保持对路况的主动判断,或许才是最稳妥的选择。
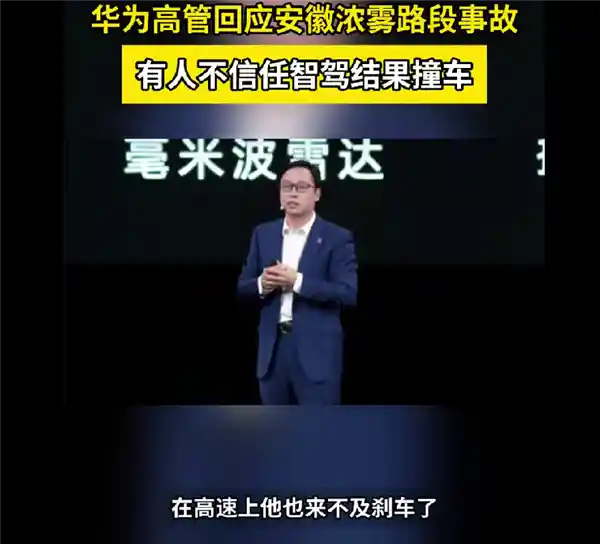
3月4日,在鸿蒙智行技术升级发布会上,华为智能汽车解决方案事业部CEO靳玉志就此前安徽浓雾路段发生的事故进行了公开回应。
我们在春节期间遭遇了一起重大事故。当时车辆处于乾坤智驾辅助驾驶模式,经过安徽一段长达的浓雾路段。在浓雾环境下,智驾系统已将车速降至60公里/小时。
但是人(肉眼)看不到,觉得很安全,他就把车速调到了超过100公里。而且他的脚持续踩在油门上、电门上,持续工作在97公里的时速。
当车辆在浓雾中行驶时,驾驶员发现前方有一排静止的车辆,但由于能见度极低,已经无法及时刹车,最终导致连环碰撞事故。

所以说,其实,目前这种毫米波雷达技术已经接近其性能极限,只能探测几十米范围内的目标,并据此计算出车辆应保持的合理车速。然而,一些驾驶员仍选择超速行驶,这无疑增加了交通事故的风险。 从安全角度来看,技术虽有局限,但驾驶员的责任同样不可忽视。在现有设备无法全面覆盖的情况下,更应强化交通法规的执行和驾驶者的安全意识,避免因超速带来的潜在危害。
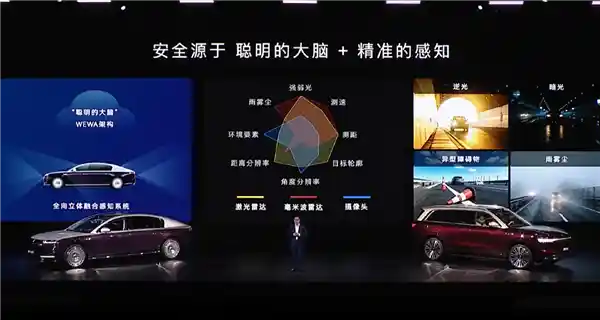
此外,靳玉志还放出一张图,清晰地呈现了不同传感器的特点。
简单来说,激光雷达、毫米波雷达以及视觉摄像头,在不同应用场景中各具优势。
那他们之间到底有何区别呢?
早在2025年4月,余承东曾发布过一则科普视频,解释了配备智能辅助驾驶功能的汽车是如何实现“眼观六路,耳听八方”的。
“一台智能辅助驾驶的汽车,它没有眼睛,遇到障碍物,它是如何发现并且避开的呢?”
余承东表示,早在上个世纪,工程师就已经想到了用摄像头来代替人眼,摄像头可以真实地还原人眼看到的场景,包括交通的标志、红绿灯等等,但它和人眼一样,在逆光、夜晚、雨雾天,很容易看不清楚,产生误判。
于是乎,工程师们提出了一种解决方案,即加装毫米波雷达。这种设备不受光线影响,夜间驾驶时具备稳定的探测能力。即使在暴雨、大雾、沙尘等恶劣天气条件下,其性能也远优于摄像头。
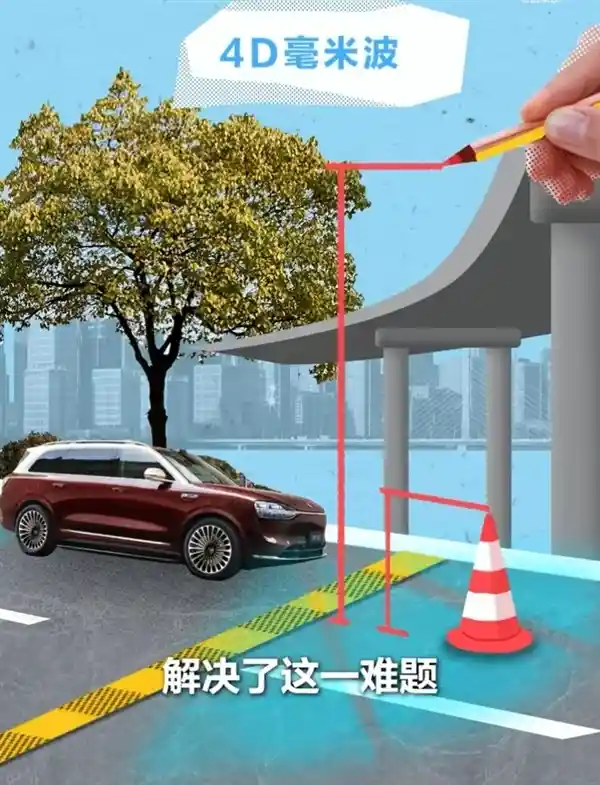
然而,探索的脚步从未停歇,人类对未知的追求永无止境。传统毫米波雷达仍存在其局限性,它只能测量目标的距离和运动速度,却无法获取高度信息。这意味着,地面的减速带、障碍物以及上方的天桥,在它看来并没有本质区别。
传统毫米波雷达在某些复杂场景中难以准确识别,因此无法让车辆根据实际情况做出相应的反应。 在当前自动驾驶技术的发展过程中,传感器的精准度至关重要。毫米波雷达虽然在探测距离和速度方面表现良好,但在面对复杂环境时仍存在局限性,这直接影响了车辆对周围情况的判断与应对能力。要实现更安全、更智能的驾驶体验,还需要进一步提升感知系统的性能,结合多种传感器优势,才能更好地应对多变的交通环境。
针对这些不足,4D毫米波雷达引入了对高度的探测能力,有效解决了这一问题。
毫米波雷达在目标识别方面仍存在一定局限,它只能捕捉到物体的大致轮廓,而无法准确判断障碍物的具体形状。这种技术特性在实际应用中可能会影响对复杂环境的判断,尤其是在需要高精度感知的场景中,如自动驾驶或智能交通系统。尽管毫米波雷达在探测距离和成本方面具有优势,但其识别能力的不足仍然是一个亟待解决的问题。
这时候,就该激光雷达出场了。
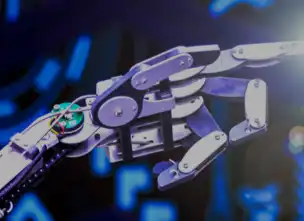
工作原理上,激光雷达通过发射人眼看不见的激光束,遇到物体后反射回来,形成由数百万个点组成的三维点云,例如图中展示的手掌。这种技术在自动驾驶、机器人导航和三维建模等领域发挥着重要作用。它能够精准捕捉环境的立体信息,为智能系统提供关键的数据支持。随着技术的不断进步,激光雷达的应用范围也在逐步扩大,未来有望在更多领域实现突破性应用。
激光雷达具有更高的识别精度,但在穿透能力方面不如毫米波雷达。同时,它们也无法像摄像头那样获取颜色和亮度信息,例如红绿灯的显示情况。
所以,摄像头、4D毫米波雷达和激光雷达相互补充、协同运作,只有将三者融合的感知方案应用其中,才能有效应对暗光、强光干扰,不受雨雪雾等恶劣天气影响,实现更精准的距离与速度测量。